3D scene reconstruction using only 2D images transforms flat, two-dimensional photos into volumetric or mesh-based representations. This process enables applications in virtual reality, robotics, gaming, and architectural visualization. Limited viewpoints, occlusions, and varying illumination make reconstruction challenging, requiring careful algorithm design and feature extraction strategies. High-quality reconstruction provides an accurate spatial and geometric understanding of real-world scenes from simple photographic data.
Table of Contents
Importance of 3D Reconstruction from 2D Images
Accurate spatial understanding allows immersive VR and AR experiences.
Reduces costs compared to traditional LiDAR or 3D scanning.
Enables historical reconstruction from archival images.
Assists autonomous robots and vehicles in navigation.
Provides a foundation for simulation, digital twins, and visualization tasks.
Key Components of a 2D-to-3D Reconstruction Pipeline
Component
Role in Reconstruction
2D Image Dataset
Contains multiple images captured from different viewpoints.
Camera Parameters
Provides intrinsic and extrinsic matrices for accurate projection.
Feature Extraction
Detects edges, textures, and keypoints for correspondence.
Depth Estimation
Infers per-pixel distance from camera to scene surfaces.
3D Representation
Builds meshes, point clouds, voxels, or implicit functions.
Challenges in 3D Reconstruction
Limited viewpoints create occlusions and missing surfaces.
Varying illumination, shadows, and reflections reduce accuracy.
Scale ambiguity occurs without known distances between cameras and objects.
Motion blur and noise in input images degrade reconstruction quality.
High-resolution 3D models require significant computational resources.
Depth Estimation Techniques
Technique
Description
Stereo Matching
Estimates depth by comparing pixel disparity between two images.
Multi-View Stereo
Uses multiple overlapping images to generate dense depth maps.
Monocular Depth Prediction
Uses neural networks to predict depth from a single image.
Photometric Consistency
Optimizes 3D points to minimize color differences across images.
Depth maps provide critical information for reconstructing accurate geometry.
Combining multiple depth maps from different views reduces noise and occlusion errors.
Learned depth priors in neural networks help infer unseen regions in sparse datasets.
Feature Matching and Alignment
Keypoints are detected using SIFT, SURF, ORB, or other feature detectors.
Corresponding descriptors are matched across multiple images to identify overlapping regions.
RANSAC or robust optimization removes mismatched points and ensures geometric consistency.
Accurate feature alignment improves mesh and point cloud quality during reconstruction.
Multi-scale feature extraction captures both global scene layout and fine details.
3D Representation Methods
Representation
Usage
Point Clouds
Discrete 3D points representing scene surfaces.
Meshes
Triangles connect points to form continuous surfaces.
Voxels
Scene represented as a volumetric occupancy grid.
Implicit Functions
Neural networks encode continuous 3D shapes.
Mesh-based reconstruction is efficient for rendering but may require post-processing.
Implicit neural representations, such as NeRF, allow smooth reconstruction with fewer artifacts.
Voxel grids are memory-intensive but facilitate volumetric operations like collision detection.
Neural Network Approaches for Reconstruction
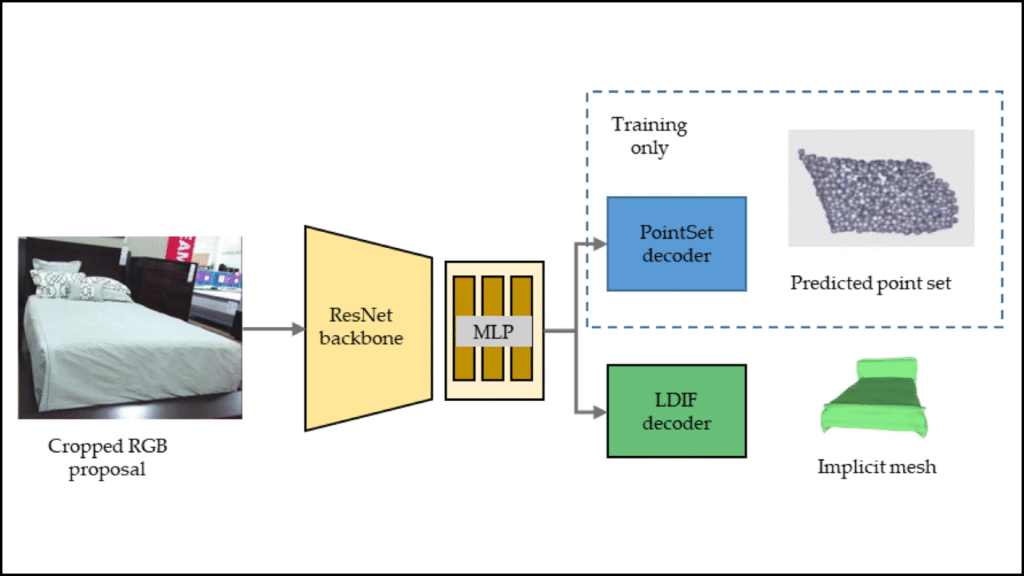
Encoder-decoder architectures convert 2D images into 3D volumes.
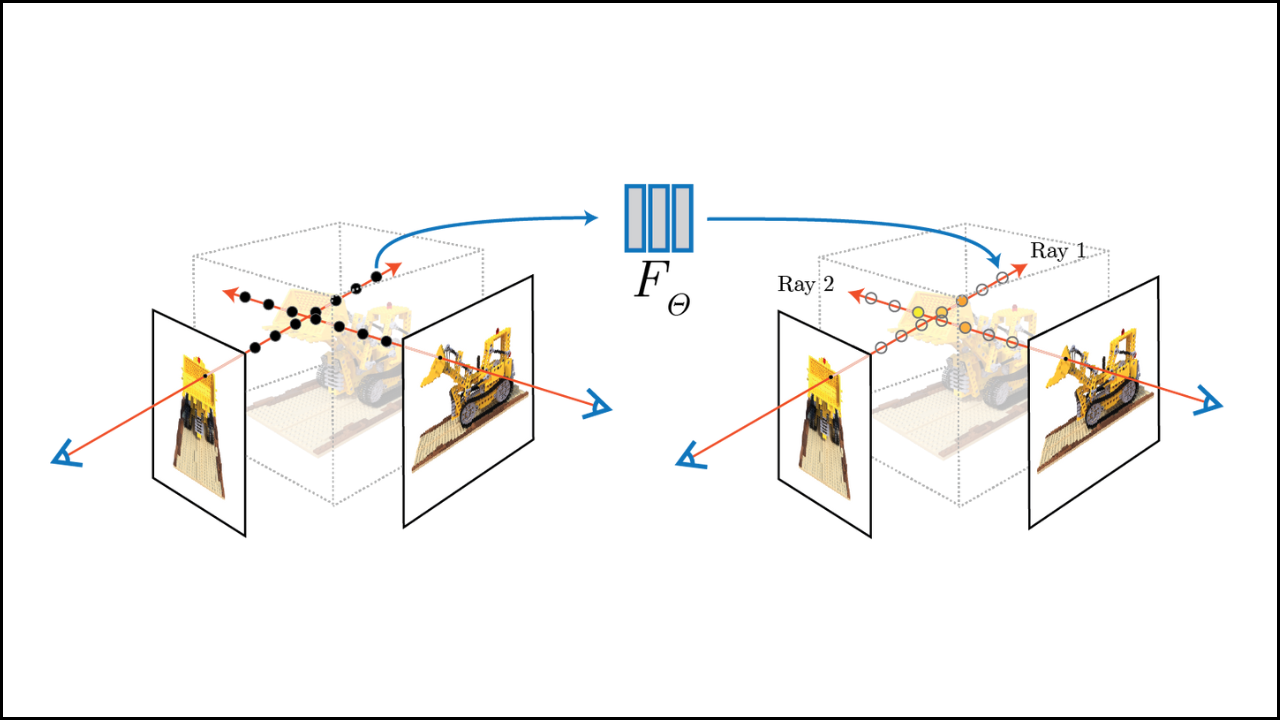
Neural Radiance Fields (NeRF) model scene color and density along rays for volumetric rendering.
Multi-view feature aggregation combines information from all images to reduce ambiguity.
Regularization and perceptual losses improve reconstruction of fine details.
Training data can include synthetic scenes or captured multi-view datasets.
Evaluation Metrics
Metric
Purpose
PSNR
Measures image similarity of rendered reconstructions.
SSIM
Evaluates structural similarity between rendered and reference images.
Chamfer Distance
Quantifies distance between predicted and ground-truth points.
IoU (Intersection over Union)
Measures overlap for voxel-based reconstructions.
Normal Consistency
Assesses geometric accuracy of surface normals.
Visual inspection is essential to detect artifacts that quantitative metrics may miss.
Tracking metrics across epochs helps evaluate convergence and improvements from custom loss functions.
Practical Tips for High-Quality Reconstruction
Capture images from multiple viewpoints to reduce occlusions.
Maintain consistent lighting and avoid harsh shadows.
Calibrate cameras for precise projection and alignment.
Apply multi-scale feature extraction for better global and local accuracy.
Combine classical geometry-based methods with neural approaches for robust results.
Use depth regularization and smoothness constraints to avoid noisy surfaces.
Autonomous Vehicles: Generate spatial maps for navigation and collision avoidance.
Cultural Heritage: Digitally preserve historical sites from photographs.
Architecture & Interior Design: Visualize renovations and layouts in 3D.
Robotics: Build environment maps for manipulation and path planning.
Simulation and Training: Create realistic 3D scenarios for research and AI training.
Last Words
3D reconstruction from only 2D images converts flat, two-dimensional data into accurate 3D models. Depth estimation, feature alignment, and suitable 3D representations are crucial for high-quality reconstruction. Neural networks, combined with classical geometry methods, improve accuracy and handle occluded or sparse datasets. Proper evaluation using metrics like PSNR, Chamfer Distance, and visual inspection ensures reliable reconstructions suitable for VR, robotics, architecture, and cultural preservation.
She is a creative and dedicated content writer who loves turning ideas into clear and engaging stories. She writes blog posts and articles that connect with readers. She ensures every piece of content is well-structured and easy to understand. Her writing helps our brand share useful information and build strong relationships with our audience.