Multi-scene learning becomes an important challenge when NeRF models must handle many environments, lighting conditions, and object layouts. NerfAcc provides a useful tool called PropNetEstimator, which helps manage multiple scenes by estimating densities and sampling rays in a structured and efficient way. This article explains how PropNetEstimator works, why it is helpful, and how to use it in a PyTorch training pipeline.
Table of Contents
Understanding PropNetEstimator in NerfAcc
Key Purpose
PropNetEstimator helps NeRF models:
- Handle many scenes together
- Maintain separate density grids
- Improve sampling quality
- Reduce memory waste
- Enable dynamic scene batching
Core Idea
PropNetEstimator builds density proposals for each scene. These proposals guide ray sampling so the renderer only samples where geometry likely exists.
Main Features
- Multiple proposal networks
- Scene-specific grids
- Faster coarse-to-fine sampling
- Support for dynamic updates
- Compatibility with PyTorch and CUDA
Why PropNetEstimator Is Useful for Multi-Scene NeRFs
Key Benefits
- Efficient handling of many scenes in the same dataset
- Reduced over-sampling in space
- Stable sampling even with large spatial differences
- Better separation of scene-level geometry
- More consistent training curves
Typical Use Cases
- Many indoor scenes
- Street-level NeRF datasets
- Synthetic multi-environment collections
- Dynamic datasets with a large variety
Workflow of PropNetEstimator
How It Works
- Proposal networks predict densities
- Grids store density distributions
- The estimator uses these grids to sample rays
- Samples are passed to the NeRF model
- Results update scene-specific proposals
Data Flow Steps
- Input rays → Proposal networks
- Predicted densities → PDF generation
- Ray sampling → Final NeRF query
- Output radiance + geometry predictions
Key Components of PropNetEstimator
| Component | Description |
|---|---|
| Proposal Networks | Shallow MLPs that generate rough density predictions. |
| Density Grids | 3D grids storing coarse geometry patterns for each scene. |
| Sampler | Ray sampler that uses density proposals to guide sample locations. |
| Scene Manager | Structure that keeps track of multiple scenes and their parameters. |
| Updater | Module that refreshes density grids at regular intervals. |
Setting Up PropNetEstimator in a Multi-Scene Pipeline
Recommended Data Structure
- Separate folders for each scene
- Metadata for bounding boxes
- Ray origins and directions are stored per scene
- Single training loop that switches scenes each iteration
Essential Inputs for PropNetEstimator
| Input | Description |
|---|---|
| Scene IDs | Unique integer for each scene. |
| Rays | Ray origins and directions for sampling. |
| Bounds | Scene bounding areas to limit sampling. |
| Proposal Network Outputs | Coarse densities that drive sampling. |
PyTorch Example: Initializing PropNetEstimator
from nerfacc.estimators.prop_net import PropNetEstimator import torch estimator = PropNetEstimator( roi_aabb=torch.tensor([[-1, -1, -1, 1, 1, 1]]), num_scenes=5, proposal_net_args={ “hidden_dim”: 32, “num_layers”: 2 } )
Explanation of Important Arguments
roi_aabb→ bounds for each scenenum_scenes→ total number of scenesproposal_net_args→ design of the proposal networks
Using PropNetEstimator for Sampling Rays
Sampling Process
PropNetEstimator receives:
- Scene index
- Ray batch
- NeRF model
Then it returns:
- Sampled positions
- Weights for integration
- Visibility masks
Code Example
sampled = estimator.sampling( rays_o, rays_d, scene_ids, density_fn=coarse_density_model, )
Outputs Include
- Sample positions along rays
- Delta distances
- Ray masks
- Proposal weights
Updating Proposal Networks
Why Updates Matter
- Scene geometry evolves during training
- Density grids must stay accurate
- Sampling quality depends on fresh proposals
Update Example
estimator.update_every_n_steps( step=global_step, n=16, density_fn=coarse_density_model )
What Updates Achieve
- Refresh grids
- Remove floaters
- Improve later sampling
Proposal Update Effects
| Effect | Impact on Training |
|---|---|
| Better Density Alignment | More accurate geometry detection. |
| Reduced Empty-Space Sampling | Lower compute cost. |
| Sharper PDFs | Higher-quality sample placement. |
| Improved Convergence | Lower computing cost. |
Integrating PropNetEstimator into a Full Training Loop
Typical Integration Steps
- Load rays per scene
- Send rays to the estimator
- Perform coarse sampling
- Run the fine NeRF model
- Compute radiance + density loss
- Backpropagate
- Update proposal networks periodically
Key Training Tips
- Use mixed precision for speed
- Prefetch rays in CPU threads
- Pre-compute bounding boxes
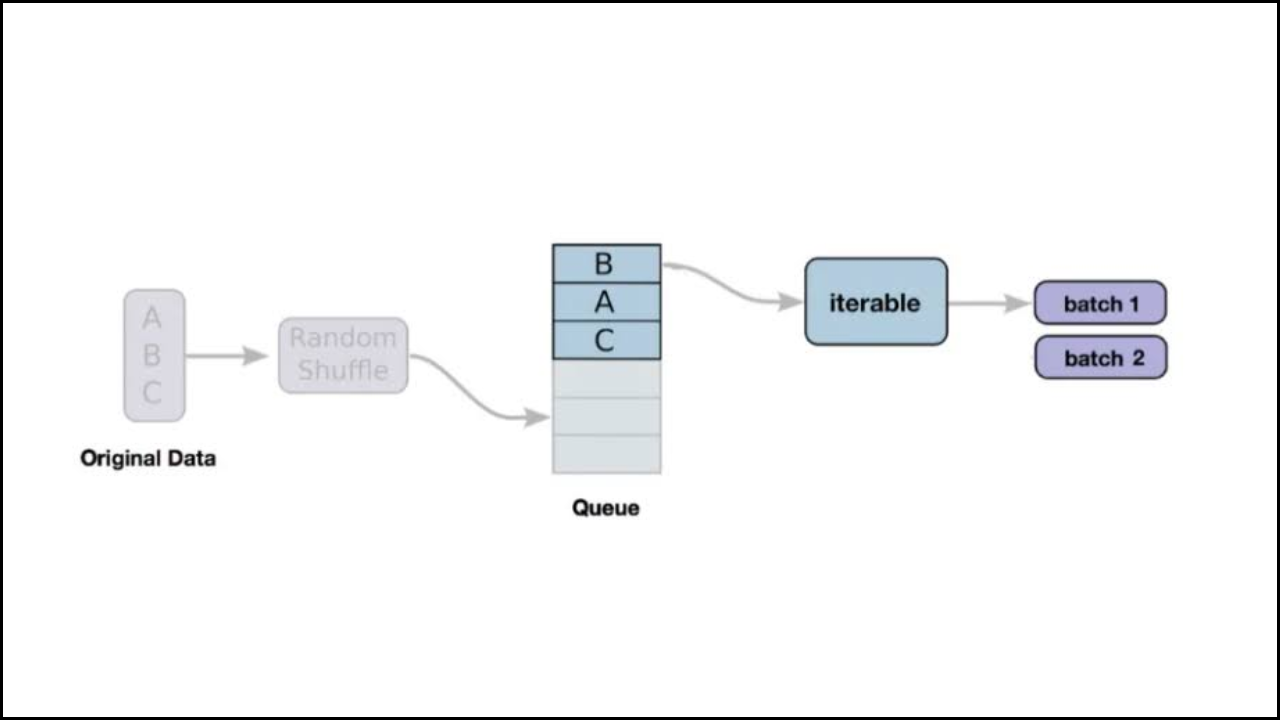
- Shuffle scenes often to avoid bias
Best Practices for Multi-Scene Training
| Practice | Benefit |
|---|---|
| Random Scene Sampling | Prevents overfitting to a single environment. |
| Consistent AABB Bounds | Keeps density grids aligned. |
| Two-Stage Proposals | Improves ray sampling accuracy. |
| Dynamic Grid Updates | Adapts to changing scene geometry. |
| Scene-Level Normalization | Ensures stable learning across scenes. |
Common Mistakes to Avoid
Frequent Issues
- Using one bounding box for all scenes
- Forgetting to update proposal networks
- Oversizing proposal grid resolution
- Unbalanced scene sampling
Why These Issues Matter
- Poor geometry separation
- Wasted GPU memory
- Slower convergence
- Inaccurate multi-scene learning
Last Words
PropNetEstimator becomes a powerful component for multi-scene NeRF workflows by creating scene-specific proposals, improving sampling quality, and keeping training efficient. Proper use of proposal networks, grid updates, and balanced scene batching results in faster convergence and more accurate radiance fields across diverse environments.PropNetEstimator becomes a powerful component for multi-scene NeRF workflows by creating scene-specific proposals, improving sampling quality, and keeping training efficient. Proper use of proposal networks, grid updates, and balanced scene batching results in faster convergence and more accurate radiance fields across diverse environments.