A smooth integration of NerfAcc into an existing NeRF pipeline creates a structured path toward faster training, cleaner sampling, and more efficient memory use. A clear understanding of how NerfAcc fits inside a NeRF workflow allows developers to optimise rendering steps without losing image quality. A practical explanation of modules, pipeline flow, and implementation choices helps teams adopt NerfAcc confidently while maintaining control over their current codebase.
Table of Contents
Understanding the Role of NerfAcc Inside a NeRF Workflow
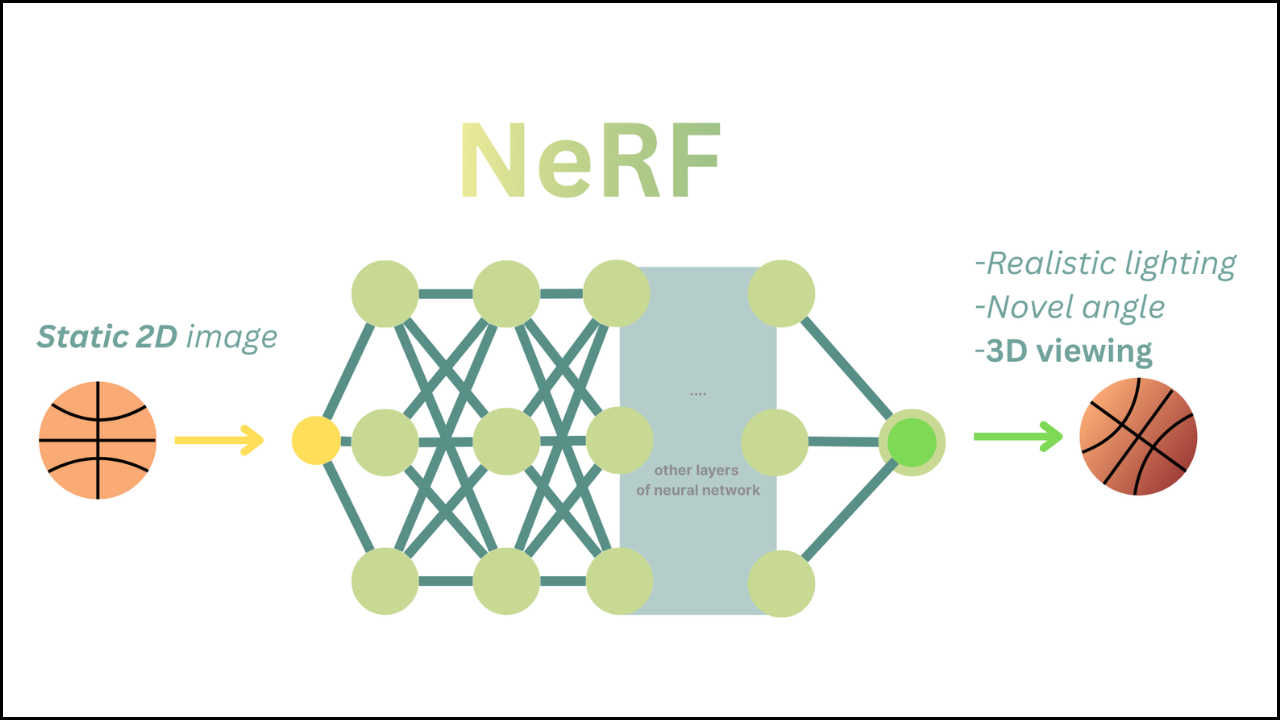
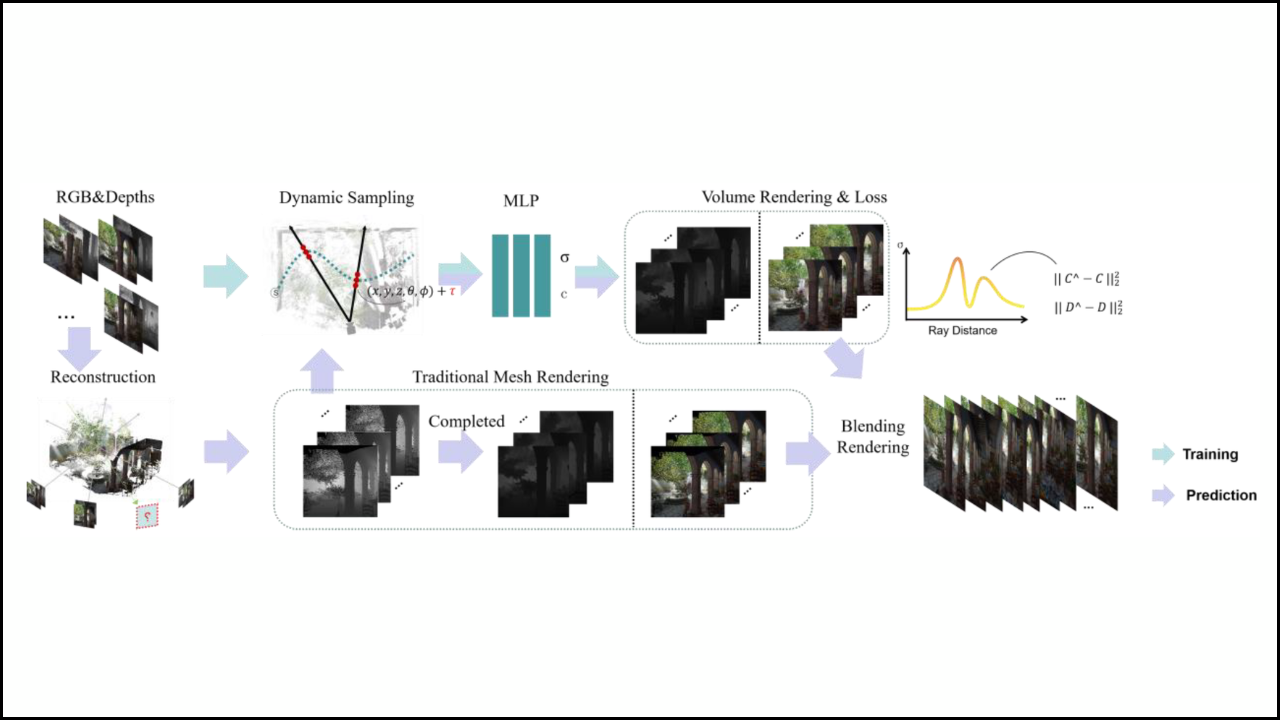
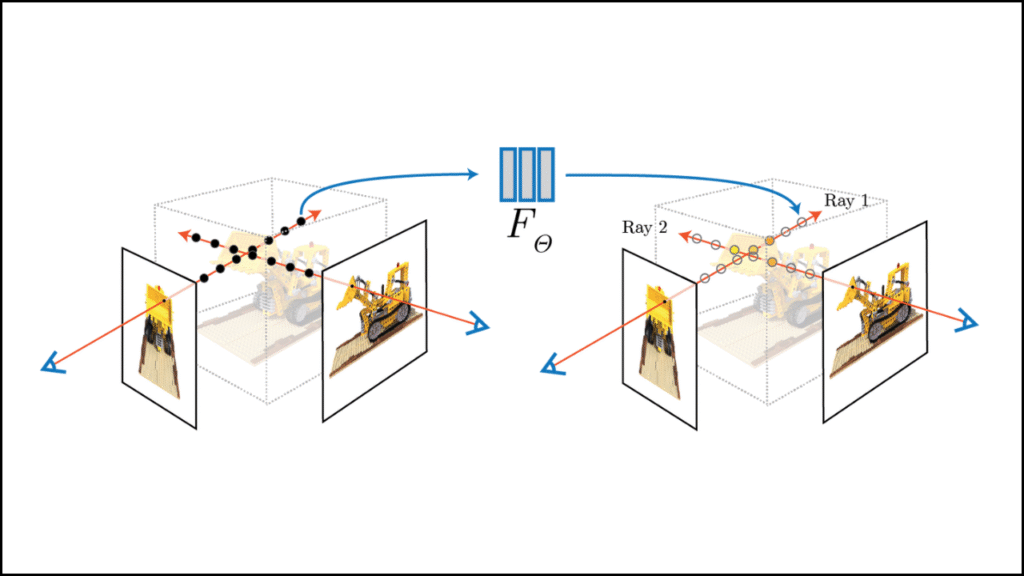
A modern NeRF system includes data loading, ray generation, sampling, density estimation, colour prediction, and volumetric rendering. NerfAcc positions itself in the sampling and rendering stages by replacing the traditional dense sampler with an occupancy-aware strategy.
Key points:
- NerfAcc improves sampling by ignoring space and focusing on meaningful geometry.
- Acceleration structures allow efficient traversal through complex scenes.
- Modular design ensures compatibility with most PyTorch-based NeRF implementations.
Benefits of Integrating NerfAcc into an Existing Code Structure
- Reduced computation cost because rays avoid useless empty regions.
- Greater training stability as sampling patterns highlight real geometry.
- Improved GPU utilisation through compact voxel grids.
- High flexibility that supports both single-scene and multi-scene NeRF frameworks.
Preparing the Pipeline for NerfAcc Modules
- Codebase inspection helps identify ray creation, sampling functions, and rendering loops.
- Separation of responsibilities ensures NerfAcc receives clean ray origins, directions, and bounds.
- Dataset compatibility must be checked for camera matrices and scaling across scenes.
Installing and Importing NerfAcc Components
- Installation through pip provides the required CUDA kernels and dependencies.
- Importing OccupancyGrid, ray_samplers, and density estimators allows the pipeline to hand over sampling tasks to NerfAcc efficiently.
Configuring an Occupancy Grid
- Grid resolution should align with scene dimensions.
- Update intervals determine how often the grid learns new geometry.
- Warm-up steps stabilise the grid before full training begins.
Replacing Traditional Sampling with NerfAcc Sampling
Conventional Sampling Challenges
- Uniform dense sampling wastes computation in large empty spaces.
- Complex scenes slow down training due to excessive sample counts.
- High ray variance reduces consistency in early training.
NerfAcc Sampling Advantages
- Adaptive sampling targets high-occupancy areas.
- Hierarchical updates adapt shading points as training progresses.
- Ray pruning removes rays with minimal scene contribution.
Core Components You Insert Into the Pipeline
Key NerfAcc Components and Their Function
| Component | Function |
|---|---|
| OccupancyGrid | Tracks regions of space likely to contain geometry. |
| PropNetEstimator | Predicts density for multi-scene or complex frameworks. |
| ray_samplers | Produces sample points along rays according to occupancy criteria. |
| render_weight_from_density | Computes weights for volumetric rendering. |
| Integration utilities | Merge colours and densities into final pixel values. |
Integrating NerfAcc with Ray Generation and Volumetric Rendering
Modifying Ray Generation
- Ray origins and directions remain identical to your existing pipeline.
- Batch sampling must be adapted to pass rays through NerfAcc samplers.
- Near–far bounds should reflect correct scene scales in your dataset.
Rewriting the Volumetric Rendering Loop
- Density values are computed on sampled points returned by NerfAcc.
- Colour prediction uses the network outputs for RGB estimation.
- Rendering integration blends colour contributions using alpha-composited weights.
Integrating NerfAcc with Multi-Scene Pipelines
Multi-Scene Integration Considerations
| Aspect | Requirement with NerfAcc |
|---|---|
| Scene indexing | Must correspond to correct occupancy grids. |
| Batch scheduling | Requires scene-aware grouping of rays. |
| Density inference | PropNetEstimator supports density predictions across scenes. |
| Memory management | Grid updates must fit comfortably in GPU memory. |
Training and Updating the Occupancy Grid
Grid Updating Strategy
- Periodic updates maintain an accurate understanding of scene structure.
- Threshold tuning determines which voxels register as “occupied.”
- Learning rate dependencies guide how grid values stabilise over time.
Improving Ray Efficiency
- Higher thresholds prune space aggressively.
- Lower thresholds preserve delicate geometry at the cost of more samples.
- Dynamic thresholding adjusts behaviour across training phases.
Practical Tips When Adapting NerfAcc to a Legacy NeRF Codebase
- Consistent coordinate systems ensure correct voxel alignment.
- Correct bounding boxes help NerfAcc manage scene scales.
- Memory budgeting matters when using high-resolution grids.
- Profiling tools help identify slow custom layers that limit NerfAcc’s speedups.
- Incremental integration keeps debugging manageable.
Common Mistakes and How to Avoid Them
Frequent Integration Mistakes
| Mistake | Impact | Solution |
|---|---|---|
| Incorrect grid resolution | Low sampling efficiency | Align resolution with real scene size |
| Wrong near–far settings | Missing geometry or clipping | Calibrate using dataset depth parameters |
| Skipping occupancy warm-up | Noisy or unstable sampling | Run several warm-up iterations |
| Excessive pruning | Loss of fine details | Reduce occupancy threshold slightly |
| Inconsistent ray batching | Fluctuating training curves | Standardise batch sizes and shapes |
Evaluation After Integration
- Training curves typically converge faster with NerfAcc.
- Rendering speed increases due to fewer unnecessary samples.
- Memory usage becomes more predictable and stable.
- Image quality remains consistent when grid thresholds are tuned.
- Profiling data confirms measurable improvements over the original sampler.
Final Integration Checklist
- Pipeline entry points wired to NerfAcc sampling functions.
- Occupancy grid configured for the chosen scene scale.
- Rendering loop updated for accelerated integration.
- Data loaders are adapted to maintain consistent ray batches.
- Validation tests confirming quality and performance gains.
Summing Up
A thoughtful integration of NerfAcc into an existing NeRF pipeline brings significant speed improvements, sampling precision, and computational efficiency. A careful alignment of ray generation, occupancy grid updates, and rendering behaviour ensures that enhanced performance does not compromise visual quality. A well-planned adoption allows teams to scale their NeRF projects more efficiently while maintaining high control and accuracy.